COA Preparation
| Created by | Borhan |
|---|---|
| Last edited time | |
| Tag |
- Computer Architecture and Organization
| Computer Architecture | Computer Organization |
|---|---|
| Computer architecture explains what a computer should do | Computer organization explains how a computer works. |
| Computer architecture provides a functional behavior of computer system. | Computer organization provides structural relationship between parts of computer system |
| Computer architecture deals with high level design | Computer Organization delas with low level design (often called microarchitecture ) |
| Computer architecture assists in understanding the functionality of the computer. | Computer organization helps to understand the exact management of component of a computer |
| Actor in computer parts are hardware parts | Actor in computer organization is performance |
| Computer architecture design first | It is started after computer architecture |
| Programmer view | Transparent from programmer |
| It involves with logical attributes, like instruction sets, data types, addressing modes, etc. | It involves the relationship among physical parts of the system, like circuit etc. |
- IBM 370
| Aspect | IBM System 370 |
|---|---|
| Architecture | 32-bit mainframe computer architecture |
| Instruction set | a wide range of instructions for arithmetic, logical, data manipulation operations supporting both fixed-point and floating-point arithmetic |
| Addressing modes | provides various addressing modes including direct, indirect, indexed, base/displacement |
| Operating system | IBM’s OS/360 and its successor third party operating system like UNIX |
| Peripheral support | support for peripherals such as printers, disk drives, tape drives and communication device |
| Virtualization | introduced virtualization capabilities |
| Performance | high performance, reliability, suitable for large scale computing task in business, government and academia |
- Differences between Structure and function
| Structure | Function |
|---|---|
| Structure refers to the organization and interconnection of hardware components within a computer system | Function refers to the operation and tasks performed by the hardware components within computer system to execute instructions, process data, and interact peripherals. |
| The structure includes components such as CPU, memory, buses, input/output devices. | Functions encompass operations such as instruction fetching, decoding, execution, memory access, arithmetic/logic operations, i/o operation, system control etc. |
| It involves the arrangement and interconnection of hardware components to facilitate data flow, control signals and communication within computer system. | Functions are organized to execute instructions in a sequential or parallel manner, utilizing the capabilities of different hardware components. |
| Structure optimization involves designing and configuring hardware components to minimize bottlenecks, reduce latency, increase throughput and enhance overall performance. | Function optimization focuses on improving the efficiency of individual operations and algorithm implemented by the hardware components, utilizing techniques such as pipelining, parallel processing, caching etc. |
- Computer
System
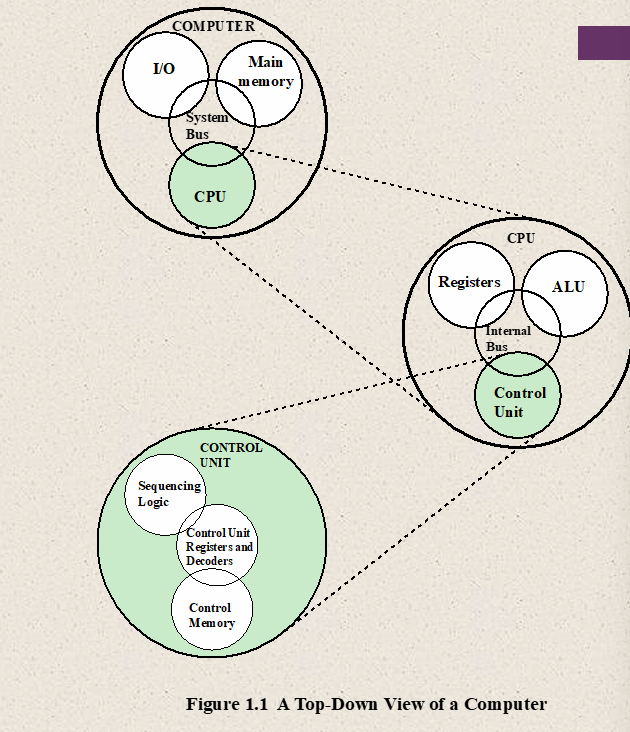
- CPU : Control Processing Unit
Potions of the computer that fetches and executes instructions
- CU
- Control Unit
- Controls the operation of the CPU
- ALU
- Arithmetic and Logic Unit
- Perform Data processing function
- Resistors
- Provides storage internal to the CPU
- CPU Interconnection
- Some mechanism that provides for communication among the CU, ALU, registers
- CU
- Main Memory : Stores data
- I/O: moves data between the computer and its external environment
- System Interconnection: Some mechanism that provides for communication among CPU, main memory and I/O. A common example of system interconnection is by means of a system bus.
Functions
- Data Processing
The data may take a wide variety of forms, and the range of processing requirements is broad.
- Data Storage
Even if the computer is processing data on the fly, the computer must temporarily store at least those piece of data that are being worked on at any given moment. Thus, there is at least short-term memory data storage function. Equally important, the computer performs a long-term data storage function.
- Data Movement
The computer ‘s operating environment consists of device that serve as either source or destination of data.
- I/O : when data are received from or delivered to a device, that is directly connected to the computer
- Data communications: when data are moved over longer distances to or from a remote device
- Control: A control unit manages the computer’s resources and orchestrates the performance of its functional parts in response to instructions.
- A top-down view of a computer
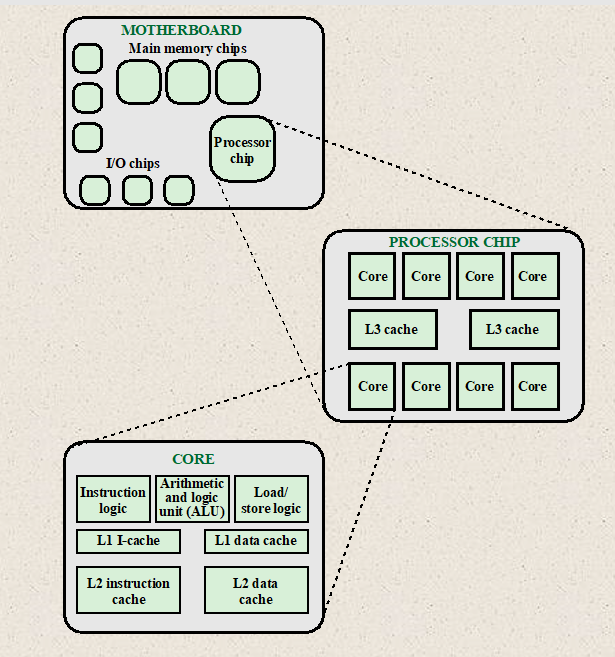
- Simplified view of Major elements of a multicore computer
- Computer Generations differences
| Aspect | First Generation | Second Generation | Third Generation | Fourth Generation | Fifth Generation |
|---|---|---|---|---|---|
| Time Period | 1940s to early 1950s | Late 1950s to mid-1960s | Late 1960s to mid-1970s | Mid-1970s to mid-1990s | Mid 1990s to Present |
| Technology | Vacuum tubes | Transistors | Integrated Circuits | Microprocessor | AI, Quantum Computing, Nanotechnology |
| Size and Power | Large, bulky, high power consumption | Smaller, less power consumption | Further miniaturization, lower power usage | Smaller, more efficient , increasingly powerful | Higher compact efficient and powerful |
| Programming | Machine language | Assembly language | High-level language (FORTRAN, COBOL) | High-level languages (C, C++, Java) | Focus on AI, ML. NLP, Robotics |
| Main usage | Scientific calculations, codebreaking | Business data processing, scientific research | Business applications, database management | Personal computers, networking, internet | AI research, ML, Robotics |
| Memory | Magnetic drum, limited capacity | Magnetic core, improved capacity | Semiconductor RAM | Magnetic and solid-state storage, RAM | Advance memory technology |
| User Interface | Punch cards, no interactive interface | batch processing limited interactive access | Time-sharing system, limited GUI | GUI, OS Support | NLP, AI agents |
| Performance | Slow, limited capabilities | Improved speed and capabilities | Further speed improvement | Rapid advancement in speed and capabilities | Focus on optimization and parallelism |
| Example | ENIAC | IBM 7000 | IBM 360 | IBM PC, Apple Macintosh | IBM Watson, Deep Blue, Google DeepMind |
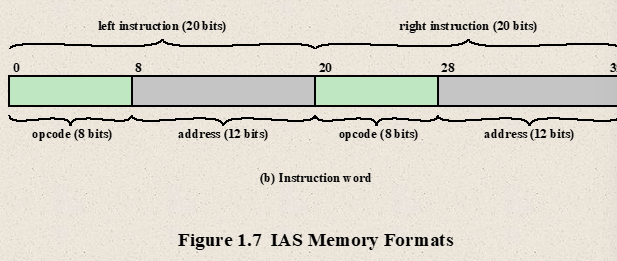
- IAS Structure
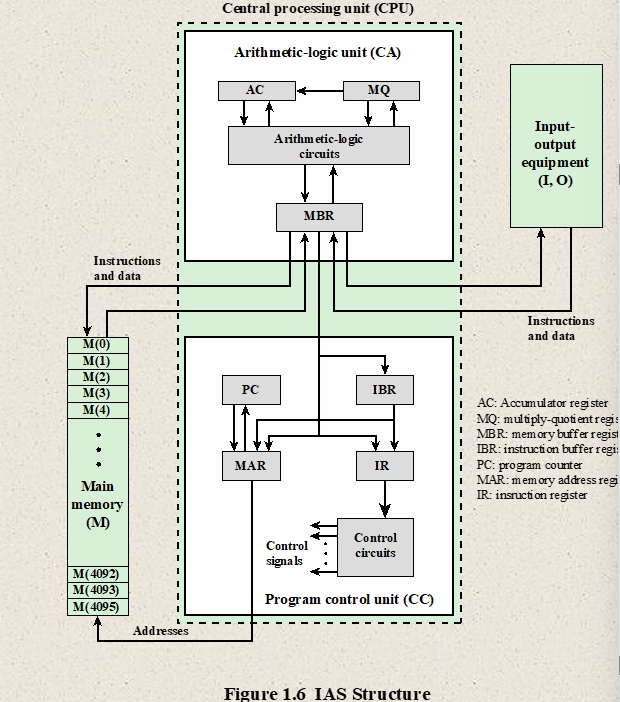
- Registers
- MBR : Memory Buffer Register
- Contains a word to be stored/received in/from memory or sent to/from the I/O input.
- MAR : Memory Address Register
- Specifies the address in memory of the word to be written from or read into the MBR
- IR : Instruction Register
- Contains the 8 bit opcode instruction being executed
- IBR : Instruction Buffer Register
- Employed to temporarily hold the right hand instruction from a word in memory
- PC : Program Counter
- Contains the address of the next instruction pair to be fetched from memory
- Accumulator (AC) and Multiplier Quotient (MQ):
- Employed to temporarily hold operands and results of ALU operations
- MBR : Memory Buffer Register
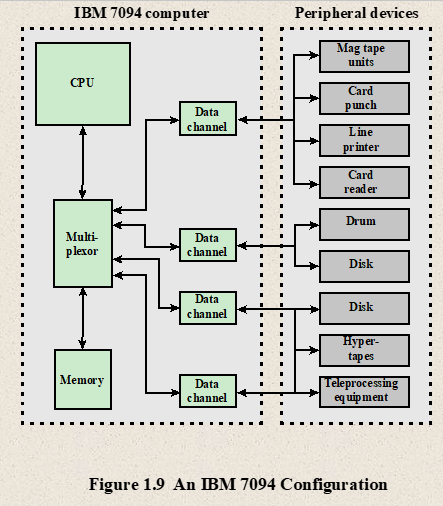
- IBM 7094 Configuration
- Moore’s Law and it’s consequence
Moore’s Law: Number of transistors that could be put on a single chip was doubling every year.
Consequences:
- The cost of computer logic and memory circuitry has fallen at a dramatic rate
- The electrical path length is shortened increasing operating speed.
- Computer becomes smaller and it more convenient to use in a variety of environments.
- Reduction in power and cooling requirements.
- Fewer interchip connection.
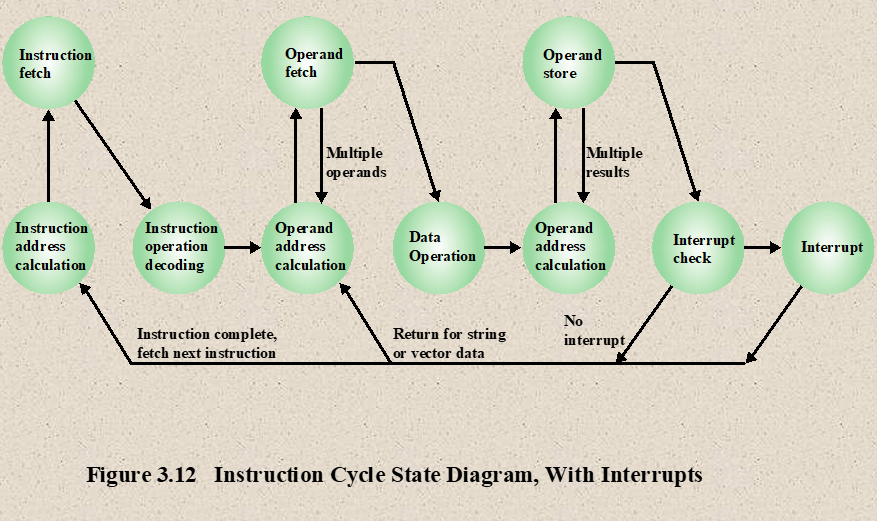
- Basic Instruction Cycle
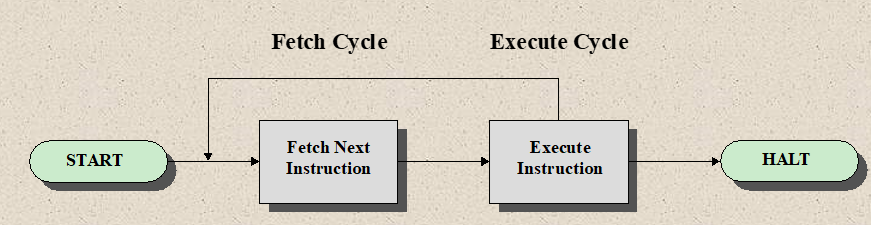
- Fetch Cycle
- The processor fetches an instruction from memory
- The PC holds the address of the instruction to be fetched next
- The processor increment the PC after each instruction fetch
- The fetched instruction is loaded into the IR
- The processor interprets the instruction and perform the required action.
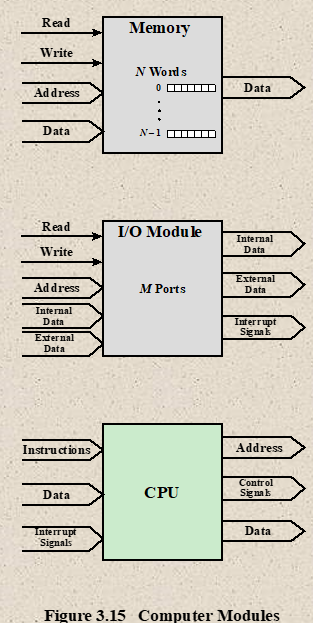
- Computer Components : Top-Level View
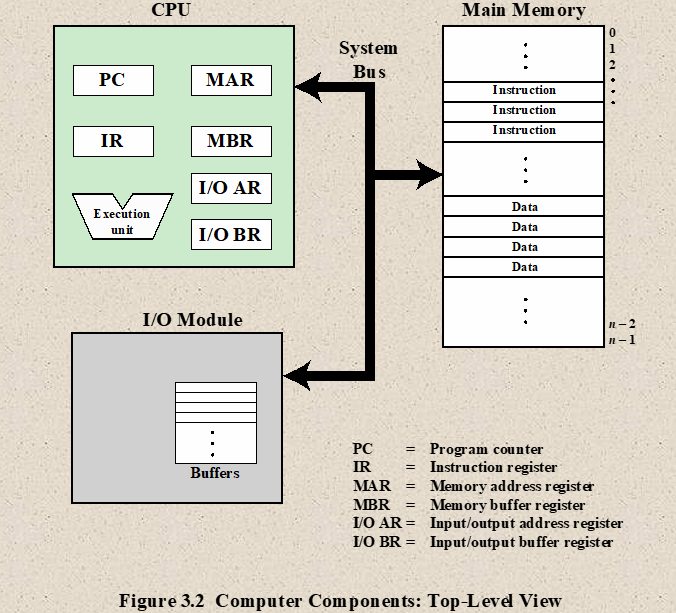
- Action categories
- Processor memory : Data may be transferred from processor to memory or from memory to processor.
- Processor I/O: Data maybe transferred to or from a peripheral device by transferring between the processor and I/O module.
- Data Processing: The processor may perform some arithmetic or logic operation on data.
- Control: An instruction may specify that the sequence be altered. For example, the processor may fetch an instruction from location 149, which specifies that he next instruction be from location 182. The processor will remember this fact by setting the program counter to 182 rather than 150.
- Characteristics of a Hypothetical machine
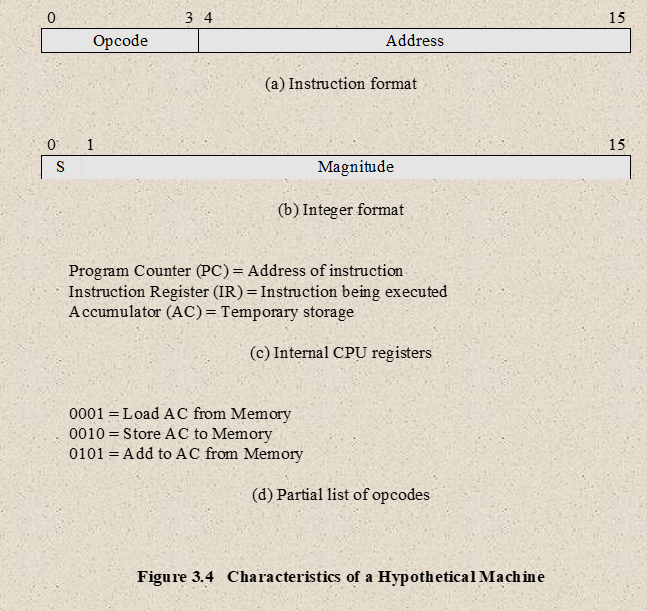
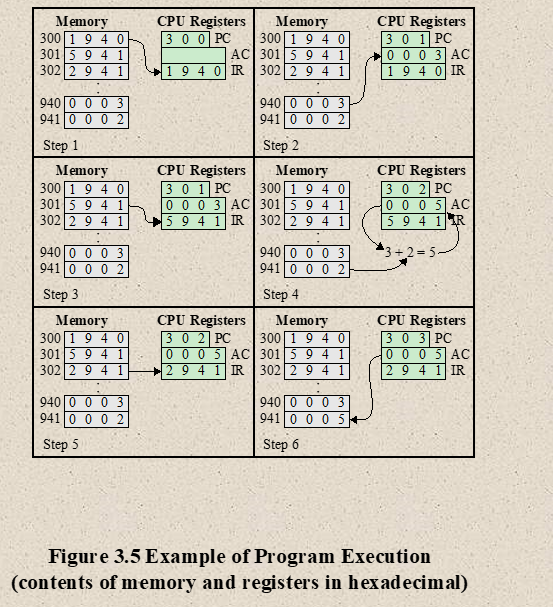
- Program Execution
- Classes of interrupts
- Program: Generated by some condition occurs as a result of an instruction execution, such as arithmetic overflow, division by zero.
- Timer: Generated by a timer within processor.
- I/O: Generated by an I/O controller, to signal normal completion of an operation.
- Hardware Failure: Generated by a failure such as power failure or memory parity error
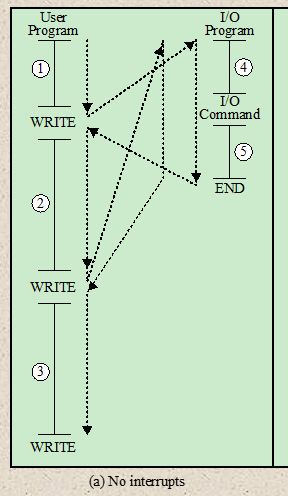
- No Interrupt Program flow
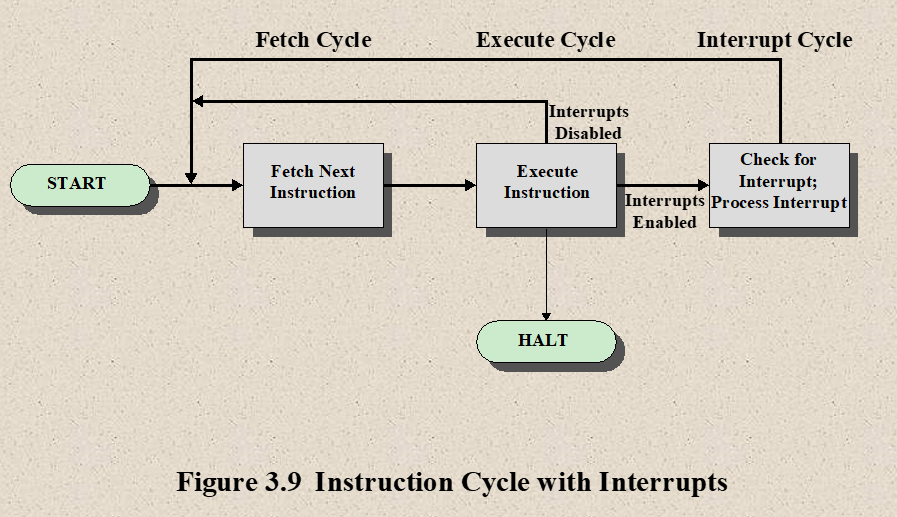
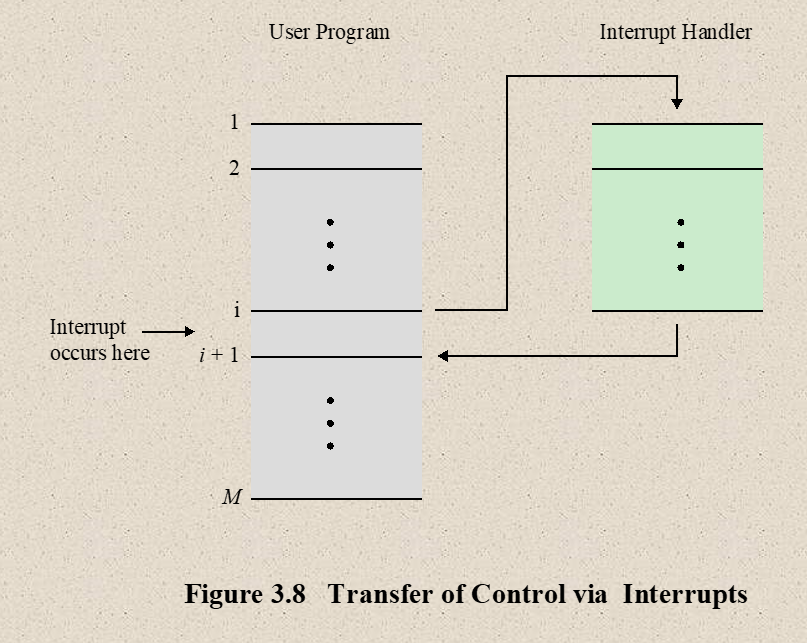
- Instruction Cycle with Interrupts
- Transfer of Control via Interrupts
- Instruction Cycle State Diagram with Interrupts
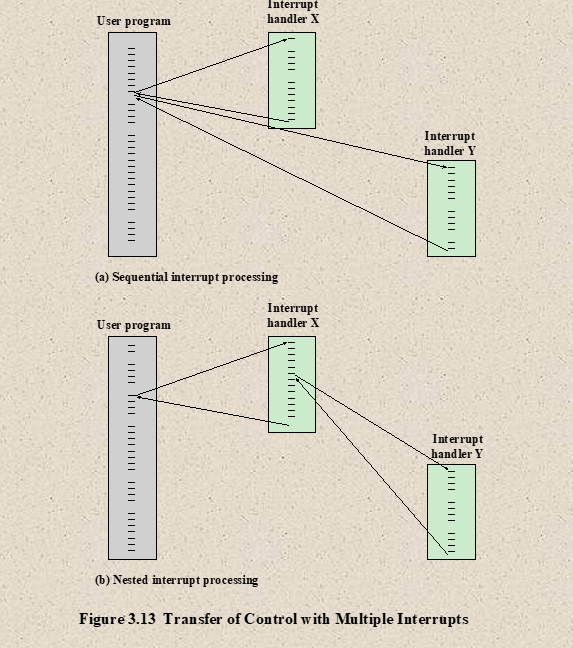
- Transfer of Control with Multiple Interrupts
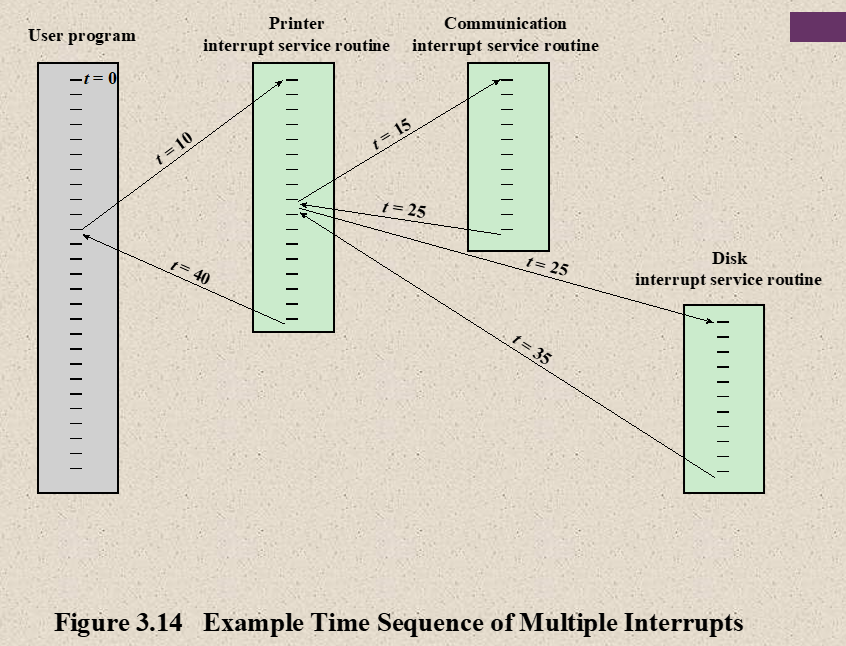
- Time Sequence of Multiple Interrupts
- I/O Function
- I/O Module can exchange data directly with the processor
- Processor can read data from or write data to an I/O module
- In some cases it is desirable to allow I/O exchanges to occur directly with memory (known as Direct Memory Access DMA)
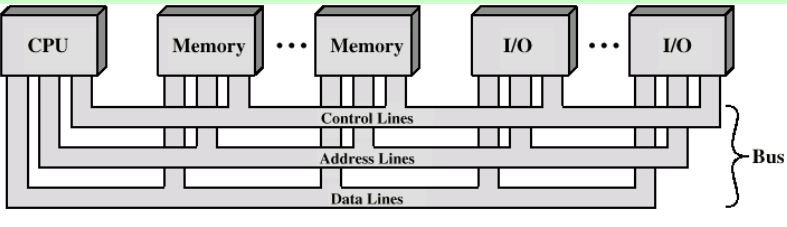
- Bus
A communication pathway connecting two or more devices.
- Bus Interconnection Scheme
- Interconnection Structure
- Memory to Processor : the processor reads an instruction from memory
- Processor to memory: the processor writes a unit of data to memory
- I/O to processor: the processor reads data from I/O device
- Processor to I/O : The processor sends data to the I/O
- I/O to or from memory: For those two cases, an I/O module is allowed to exchange data directly with memory, without going through the processor
- Bus Type
- Data Bus: carries data, Width is a key determinant of performance (16, 32 bit)
- Address bus: Identify the source or destination of data
- Control Bus: Control and timing information, memory signal, Interrupt request, Clock signals
2
- Dedicated: Permanently assigned to one function or to a physical subset of computer components
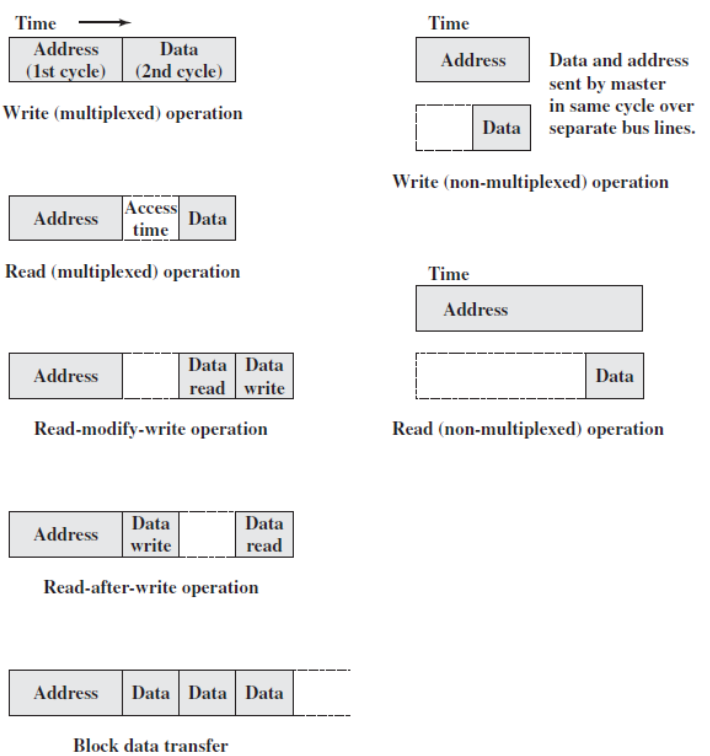
- Multiplexed: same line used for multiple purpose
- Bus Width
- The width of a bus is the number of lines. The more data lines, the more data that can be transferred simultaneously.
- “32 bit bus” → 32 data lines
- the more address lines → larger the maximum amount of memory that can be accessed
- the greater the width → the more hardware required
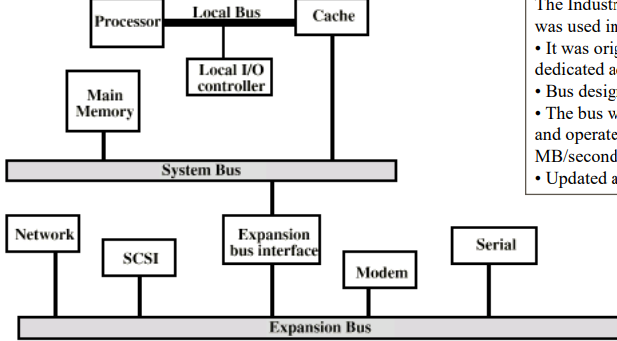
- ISA bus
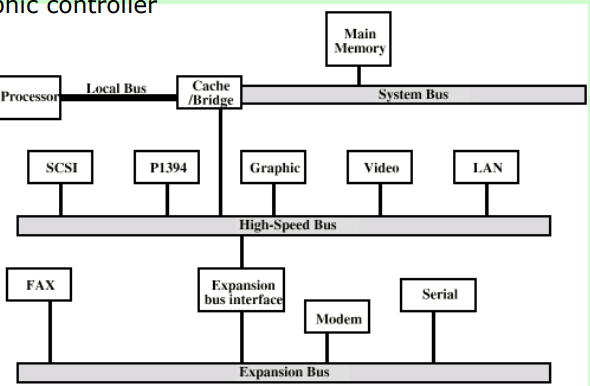
- High Performance Bus
- Multiplexed Bus Operation
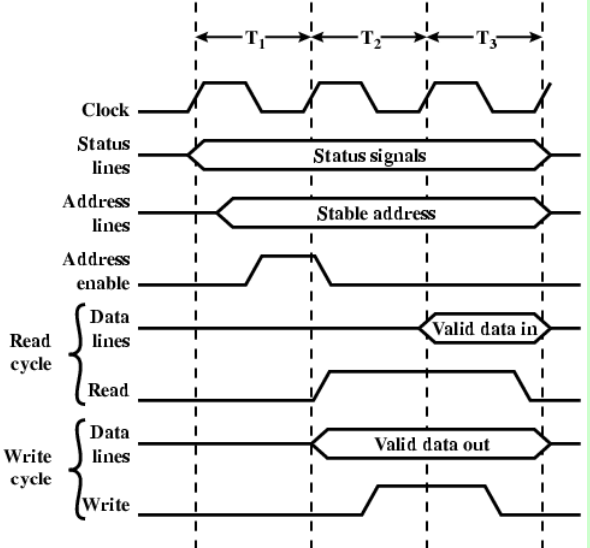
- Synchronous timing diagram
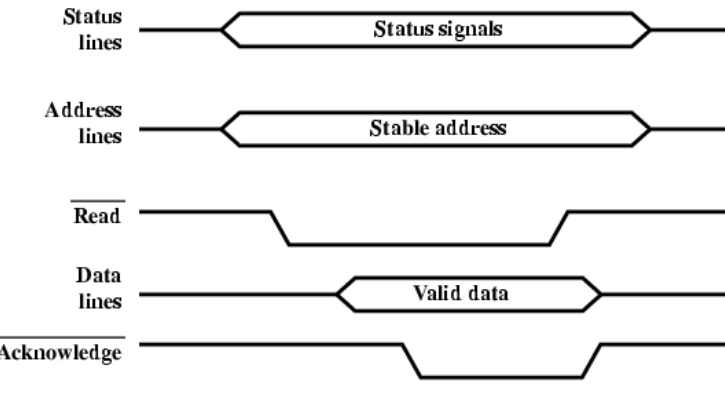
- Asynchronous write diagram
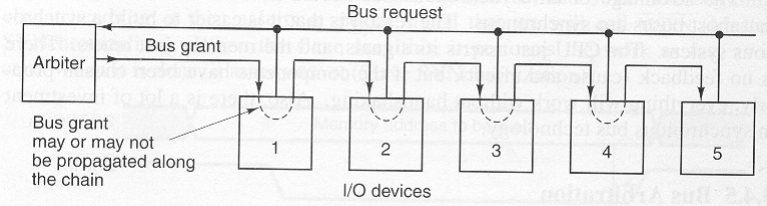
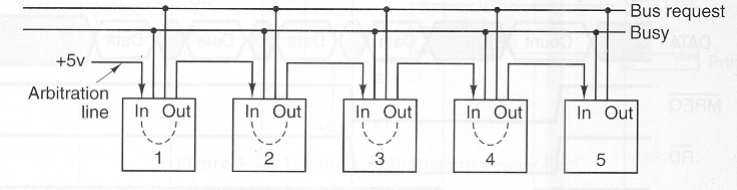
- Bus Arbitration
Bus arbitration is a process by which another device is selected to become a bus mater.
- Differences between Bus Arbitration
| Centralized | Distributed | Decentralized |
|---|---|---|
| Central authority | Shared among all nodes or devices on the bus | Distributed among multiple independent nodes |
| Controlled by a single arbiter | May involve negotiation among requesting devices | Decisions made autonomously by individual nodes |
| Granted sequentially | Negotiated among requesting devices | Nodes independently decide when to access the bus |
| Algorithm: fixed-priority or round robin | Token Passing, CSMA | Voting, Consensus |
| simple implementation | complex due to negotiation | may require sophisticated algorithm and coordination mechanism |
| performance : Efficient in smaller systems | Performance may vary depending on algorithm | Performance influenced by the arbitration method chosen |
| Example :PCI, ISA | Ethernet | Blockchain-based protocols |
Previous:
- What is addressing mode? Differentiate between a direct and an indirect addressing mode.
Addressing mode: Addressing mode is a basically a technique used for determining the operand that associates with any given instruction.
| Parameters | Direct Addressing Mode | Indirect Addressing Mode |
|---|---|---|
| Address Field | Address field contains the effective address of operand. | Address field contains reference of effective address. |
| Memory References | Requires only one memory reference | Requires two memory references |
| Processing Speed | This addressing mode has fast addressing compared to indirect addressing mode | It is slower than direct addressing mode. |
| Classification | No further classification | Further classified into two categories- Memory Indirect and Register Indirect Addressing Mode. |
| Calculation | No further calculation is required to perform the operation. | Requires further calculation to find the effective address. |
| Address Space | It occupies a smaller amount of space than the indirect mode. | It occupies a large amount of space than the direct mode. |
| Overhead | No additional overhead is involved while searching for operand. | Additional overhead is involved while searching for operand. |
| Advantage | Easy as no intermediary is involved. | Availability of large address space. |
| Disadvantage | Address space is restricted. | Requires more number of memory references. |
| Application | It aids in accessing static data and using variables. | It assists in passing arrays as parameters and implementing pointers. |
| Addressing method | Explicit: address of the operand is directly specified in the instruction | Explicit: address of the operand is stored in a memory location specified by the instruction |
|---|---|---|
| Flexibility | Less flexible: only allows for fixed memory addressing | More flexible: allows for more dynamic memory addressing |
| Code size | Requires less code: operand address is directly specified in the instruction | Requires more code: additional instructions are needed to load the operand address from memory |
| Execution speed | Faster: operand address is immediately available | Slower: additional memory accesses are required to obtain the operand address |
| Complexity | Less complex: requires fewer instructions and is generally easier to debug | More complex: requires additional instructions and memory accesses, and can be more difficult to debug |
- Distinguish between RISC and CISC Processor
| RISC | CISC |
|---|---|
| Reduced Instruction Set Computer | Complex Instruction Set Computer |
| Simple Instruction | complex |
| Simple processor circuitry c | complex |
| Requires more register | less |
| Large Program | small |
| More RAM usage | less |
| Fixed length instruction | variable |
| Fixed clock cycle | variable |
| Focus on Software | Hardware |
| used for high-end application, like video processing, telecommunication | low-end-application like home automation device, security system |
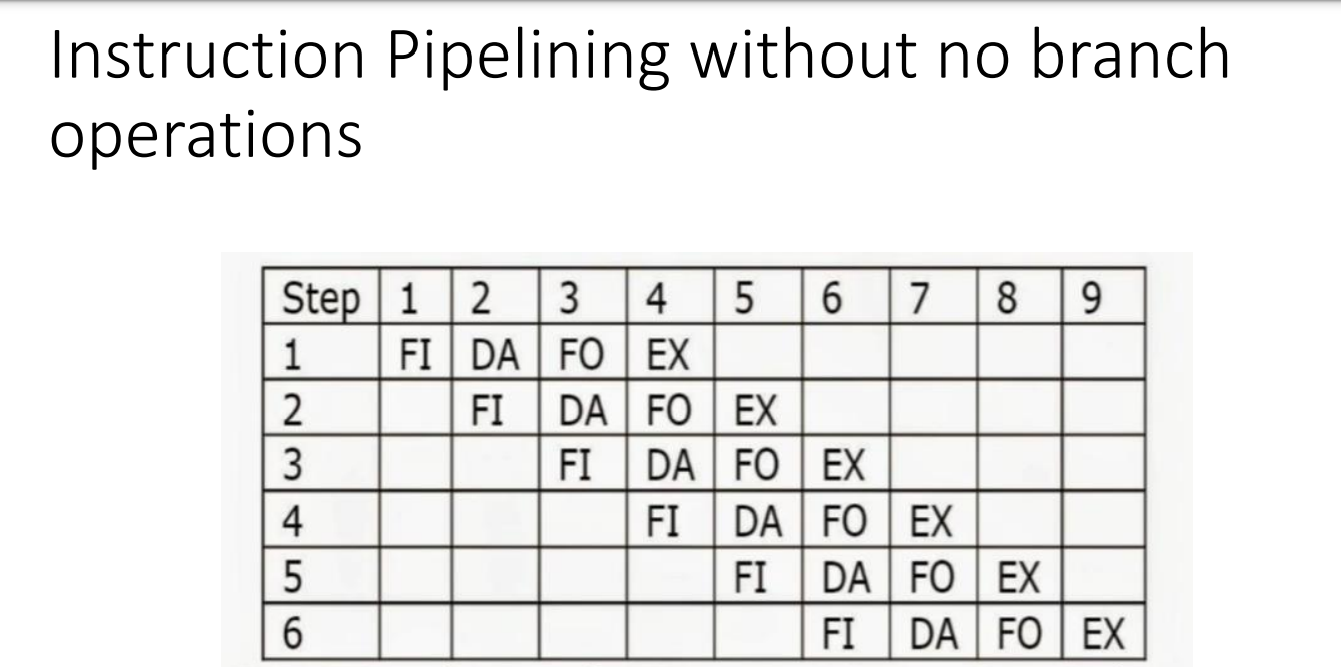
- Show the instruction pipelining with branch operations. Can Pipelining be a trouble? why? How can we resolve it ?
Instruction Pipelining is a technique used to improve instruction throughout and overall performance by allowing multiple instructions to be processed concurrently.
Handling Branches in instruction pipelining introduces challenges because the next instruction to be fetched may depend on the outcome of a branch instruction.
For Branch Operation
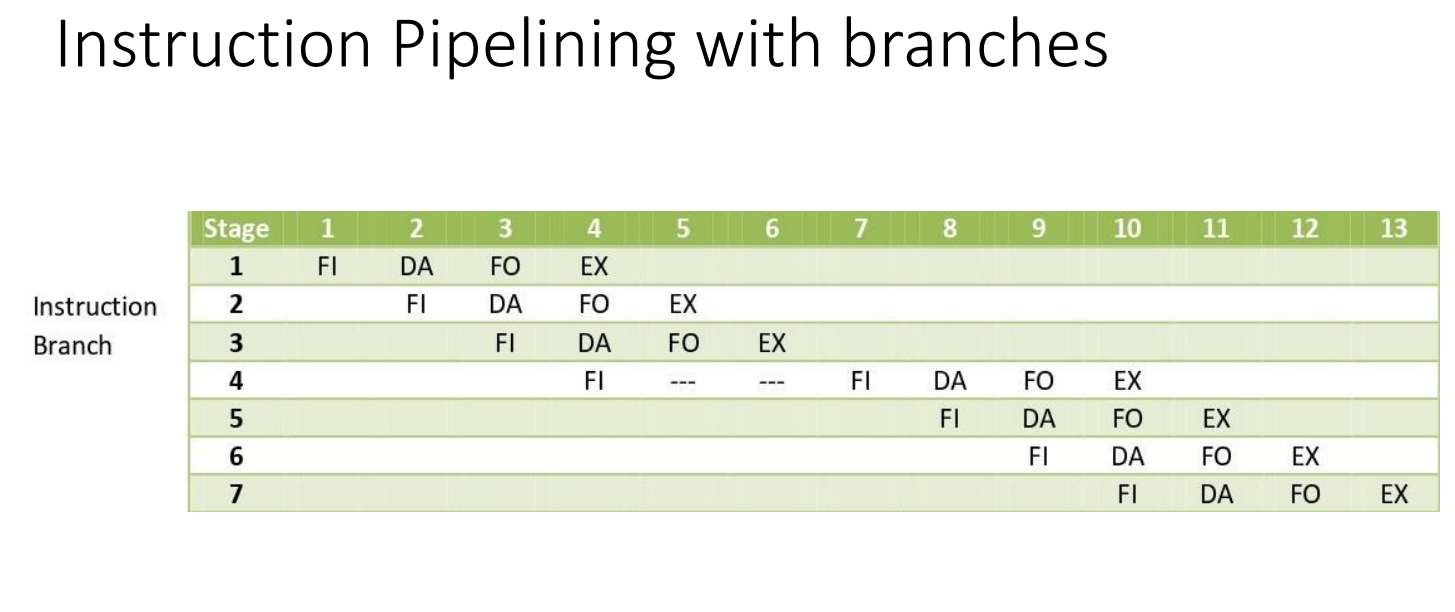
FI → Fetch the instruction from memory
DA → Decode the instruction
FO → Fetch the operands from memory
Ex → Execute the instruction.
Yes, Pipelining be a trouble for several issues and complications. These are:
- Pipeline Hazards
- Data
- Control
- Structural
- Pipeline flush
Incorrect branch prediction can lead to these type of Hazards
- Clock Speed Limitations
Deeper Pipelines may face this type of trouble.
The way of resolving:
- We can always resolve hazards by waiting
- Pipeline control must detect hazards and take action to resolve hazards.
- Difference Between Half Adder and Full Adder
| Parameter | Half Adder | Full Adder |
|---|---|---|
| Basics | The Half Adder is a type of combinational logic circuit that adds two of the 1-bit binary digits. It generates carry and sum of both the inputs. | The Full Adder is also a type of combinational logic that adds three of the 1-bit binary digits for performing an addition operation. It generates a sum of all three inputs along with a carry value. |
| Adding the Previous Carry | The Half Adder does not add the carry obtained from the previous addition to the next one. | The Full Adder, along with its current inputs A and B, also adds the previous carry. |
| Hardware Architecture | A Half Adder consists of only one AND gate and EX-OR gate. | A Full Adder consists of one OR gate and two EX-OR and AND gates. |
| Total Inputs | There are two inputs in a Half Adder- A and B. | There are a total of three inputs in a Full Adder- A. B. C-in. |
| Usage | The Half Adder is good for digital measuring devices, computers, calculators, and many more. | The Full Adder comes into play in various digital processors, the addition of multiple bits, and many more. |
| Logical Expression | Here is the logical expression of Half Adder: C = A * B S = A ⊕ B | Here is the logical expression of Full Adder: Cout = (AB) + CinA ⊕ CinB S =A ⊕ B ⊕ Cin |
- Distinguish between SRAM and DRAM
| SRAM | DRAM |
|---|---|
| Static RAM | Dynamic RAM |
| Structure is flip-flops made of transistors | Capacitors |
| faster | slower |
| complex but less dense | less complex but more dense |
| expensive | cheap |
| used in cache memory | main memory |
- 4 Bit Ripple carry adder. What is the disadvantage of it ?
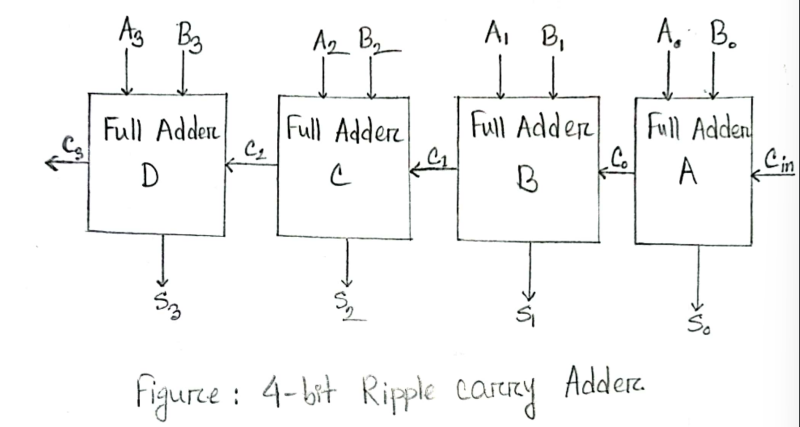
Disadvantages:
- It doesn’t allow to use all full adders simultaneously.
- Each full adder has to necessarily wait until the carry bit becomes available,
- This increase propagation time
- It is slow
- What is Parallel processing ? Discuss about the levels parallel processing with proper examples.
Parallel processing is a method in computing of running two or more processor to handle separate parts of an overall task.
Four levels:
- Instruction level : It refers the situation where different instruction of a program are executed by different processing elements. Most processor has several execution units and can execute several instruction at the same time.
- Loop level: At this level consecutive loop iterations are the candidates for parallel execution. There is a lot of scope for parallel execution at loop level.
Example : in C language,
for(i=0; i≤n; i++)
A(i) = B(i)+C(i)
Each of instruction A(i)=B(i)+C(i) can be executed by different processing element provided. There are at least n processing element.
- Procedure level: here parallelism is available in the form of parallel executable procedures. In this process the design of the algorithm plays a major role. Parallelism at this level is performed using the operating system, but it needs a good programming that helped to perform and analyze this type of parallelism.
- Program level : This is usually the responsibility of the operating system which runs processes concurrently. Different programs are obviously independent of each other. So, parallelism can be extracted by operating of the system at this level.
- Differences between SDRAM and DDR SDRAM
| SDRAM | DDR SDRAM |
|---|---|
| Synchronous DRAM | Double Data Rate SDRAM |
| 168 pins and 2 notches | 184 pins and 1 notch |
| released in 1997 | released in 2000 |
| 3.3 volts requred | 2.5 volts as standard, 1.8 volt as low voltage |
| Clock speed ranges between 100 to 166 MHz | 130 to 200 MHz |
| prefetch timing 1 ns | 2 ns |
| completion of previous read/write operation to continue other operation | does not wait for completion of previous read and write operation |
- Derive the equation of 4-bit carry look ahead adder. What are the advantage and disadvantage of it?
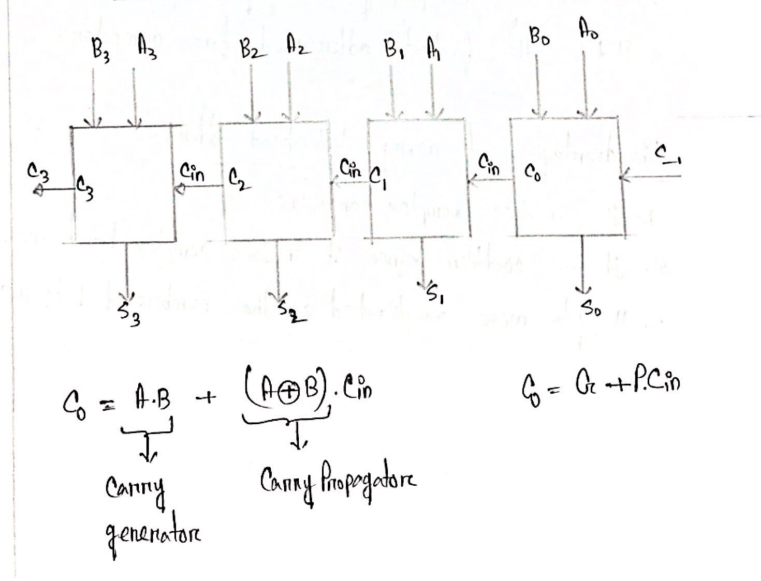
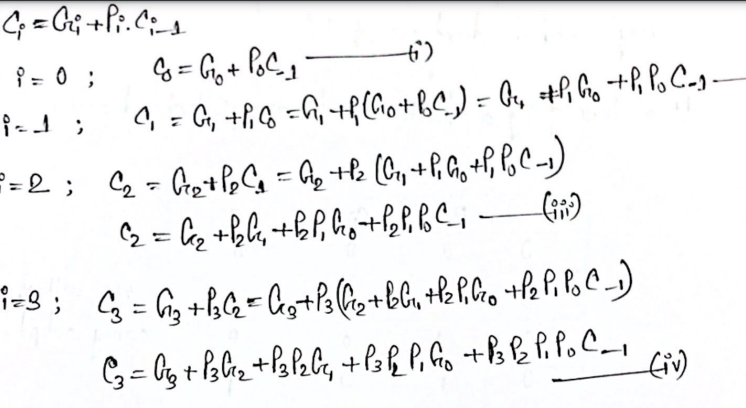
Advantage
- It generates the carry-in for each fill adder simultaneously
- It reduces the propagation delay
- It is fastest
Disadvantages
- Complex hardware
- Costlier
- It gets more complicated as the number of bits increase.